Reality Analysis job types
Reality Analysis jobs are classified in different types, depending on the detector they use. Here are these job types. For each type, we detail here the different arguments in a more compact way than in the API Reference.
Objects2D
This job uses a photo object detector to detects 2D objects in photos. If photos are oriented, it can turn these 2D objects into 3D objects. In this case, an optional collection of point clouds or meshes might help estimating 3D objects. The following analysis are available:
where the arguments are:
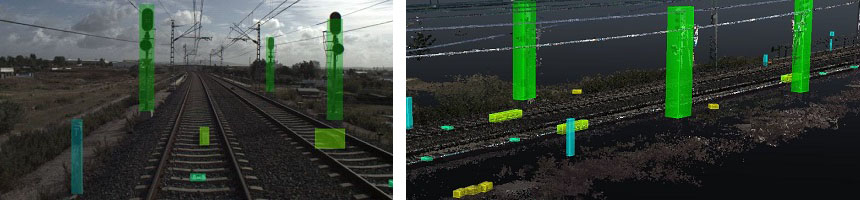
Segmentation2D

This job uses a photo segmentation detector to classify pixels in photos. If photos are oriented, it can project this classification onto a mesh or a point cloud, detecting 3D lines and 3D polygon The following analysis are available:
where the arguments are:
SegmentationOrthophoto
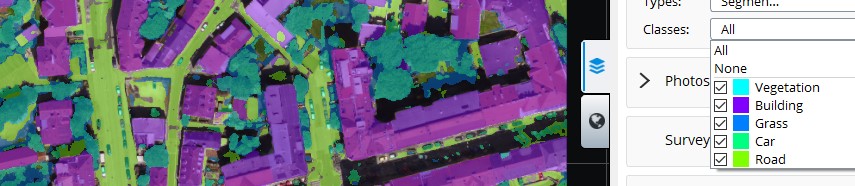
This job uses an orthophoto segmentation detector to classify pixels in an orthophoto. Depending on the detector, it can detect 2D lines and 2D polygons. The following analysis are available:
where the arguments are:
Segmentation3D
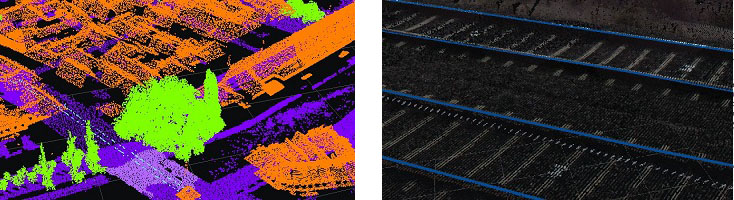
This job uses a point cloud segmentation detector to classify each point of a point cloud. Variants are available:
- it may start from a mesh.
- the 3D segmentation may be used to infer 3D objects, 3D lines and 3D polygons.
Finally, the following analysis are available:
where the arguments are:
ChangeDetection
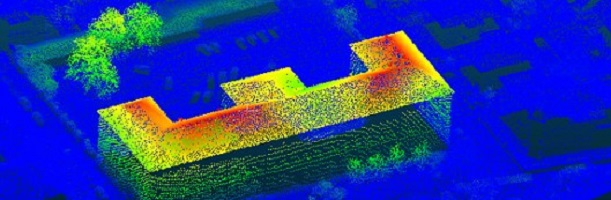
This job detects changes between two collections of point clouds or meshes3D. It uses distance or changes of color between the two collections. The output is a set of 3D objects capturing the regions with changes. This jobs does not use Machine Learning yet.
The following analysis are available:
where the arguments are:
Was this page helpful?